
ปัจจุบันมีการนำหุ่นยนต์ และยานยนต์พลังงานไฟฟ้ามาใช้งานในชีวิตประจำวันของมนุษย์เพิ่มมากขึ้นในหลายด้านและหลายภาคส่วน ล่าสุด มีความพยายามในการนำเทคโนโลยีทั้ง 2 มาประยุกต์ใช้กับภาคการเกษตรโดยเฉพาะเกษตรกรชาวนาเกลือ โดยนรวิศว์ หนังสือ นักศึกษาปริญญาโท สถาบันวิทยาการหุ่นยนต์ภาคสนาม หรือ ฟีโบ้ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี (มจธ.) ได้คิดค้นและพัฒนา “หุ่นยนต์ปรับหน้าดินอัตโนมัติ 5G Zero Carbon สำหรับเกษตรกรชาวนาเกลือ” เพื่อช่วยชาวนาเกลือประหยัดแรงงาน ลดต้นทุนค่าเชื้อเพลิง สามารถปรับหน้าดินในนาเกลือให้เรียบและแน่นขึ้น และยังช่วยลดมลภาวะรักษาสิ่งแวดล้อม

สำหรับผลงานดังกล่าวมี รศ. ดร.ชิต เหล่าวัฒนา ดร.ปราการเกียรติ ยังคง และ ผศ. ดร.ถวิดา มณีวรรณ์ เป็นอาจารย์ที่ปรึกษา โดยได้รับการสนับสนุนในส่วนของตัวรถที่ใช้ในการดัดแปลงจากอาภรณ์ หนังสือ และได้รับเงินทุนสนับสนุนจากสำนักงานพัฒนาการวิจัยการเกษตร (องค์การมหาชน)

นรวิศว์ หนังสือ นักศึกษาปริญญาโท สถาบันวิทยาการหุ่นยนต์ภาคสนาม หรือ ฟีโบ้ เจ้าของผลงานหุ่นยนต์ปรับหน้าดินอัตโนมัติ กล่าวว่า หุ่นยนต์ที่พัฒนาขึ้นนี้ เป็นรถหุ่นยนต์ไร้คนขับ เพื่อตอบโจทย์นวัตกรรมการปรับหน้าดินนาเกลือของคุณพ่อ โดยได้ดัดแปลงมาจากรถปรับหน้าดินหรือรถกลิ้งนาเกลือเดิมที่เป็นเครื่องยนต์สันดาบภายในและใช้แรงงานคนในการขับ เบื้องต้นรถหุ่นยนต์คันนี้เป็นรถขับเคลื่อนด้วยล้อหน้า โดยเปลี่ยนจากเครื่องยนต์มาเป็นมอเตอร์ที่ใช้พลังงานไฟฟ้าจากแบตเตอรี่
สำหรับกระบวนการทำงานของรถหุ่นยนต์ตัวนี้แบ่งออกเป็น 2 ส่วนหลักๆ คือ กระบวนการวางแผนซึ่งจะทำหน้าที่วางเส้นทางการเคลื่อนที่สำหรับรถโดยคำนึงถึงกลศาสตร์ที่สอดคล้องกับรถ รวมถึงการสร้างเส้นทางเพื่อให้เกิดรัศมีการเลี้ยวที่สั้นที่สุด กระบวนการถัดมาคือกระบวนการควบคุมรถหุ่นยนต์ให้เคลื่อนที่ไปตามเส้นที่กำหนดไว้(จากกระบวนการที่แล้ว) โดยตัวควบคุมจะค่อยๆ ทำการปรับความเร็วเพื่อป้องกันการกระชาก
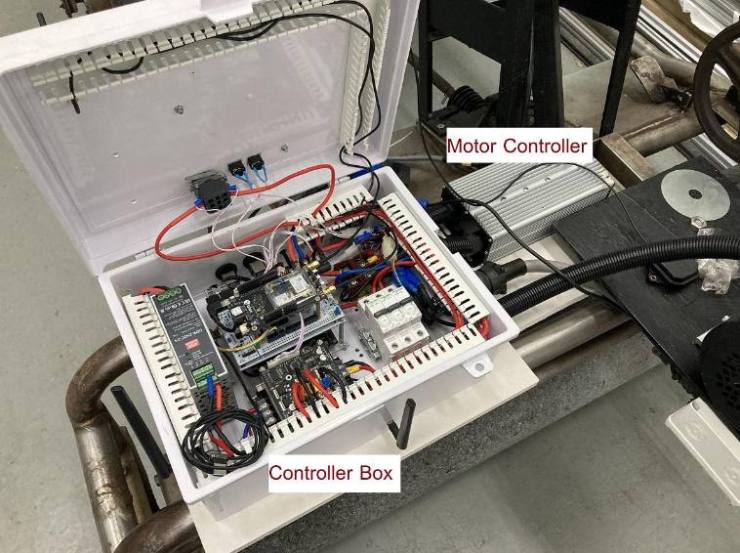
นอกจากนี้ยังนำเทคโนโลยี RTK (Real Time Kinematic Positioning) มาประยุกต์ใช้สำหรับการระบุตำแหน่งที่มีความแม่นยำสูง และ Inertial Measurement Unit (IMU) สำหรับการระบุทิศทางของรถ รถหุ่นยนต์คันนี้มีหน้ากว้าง 1.5 เมตร น้ำหนักรวมประมาณ 240 กิโลกรัม (น้ำหนักโครงรถ 160 กก.+ น้ำหนักแบตเตอรี่ 80 กก.) และมีความเร็วสูงสุดอยู่ที่ 1 เมตรต่อวินาที (ระดับความเร็วขึ้นอยู่กับมอเตอร์ที่ใช้)

นรวิศว์ กล่าวว่า ครอบครัวประกอบอาชีพทำนาเกลืออยู่ในพื้นที่จังหวัดเพชรบุรี และประกอบกิจการตั้งแต่รุ่นปู่ ปัจจุบันครอบครัวก็ยังทำนาเกลืออยู่ สำหรับกระบวนการถ่ายโอนน้ำทะเลในนาเกลือจะมีอยู่ 4 นาตามลำดับ คือ นาขัง นาแผ่ นาเชื้อ และนาวาง เมื่อน้ำที่เค็มจนถึงจุดอิ่มตัวถูกแดดเผาในนาวางก็จะเกิดผลึกเกลือบนผิวดิน เมื่อผลึกเกลือมีความหนา 1-3 ซม. ก็สามารถเก็บเกี่ยวผลผลิตได้ หลังจากการเก็บเกี่ยวจะต้องทำการชะล้างหน้าดินและปรับหน้าดินให้แน่นและเรียบก่อนเริ่มทำการถ่ายน้ำจากนาเชื้อเข้าสู่นาวางอีกครั้ง

สาเหตุที่ต้องทำการปรับหน้าดิน เนื่องจากพื้นที่ในนาวางหลังเก็บเกี่ยวแล้วจะมีความขรุขระ ไม่แน่น ไม่สม่ำเสมอ หากปล่อยไว้จะทำให้เกลือที่เก็บเกี่ยวขึ้นมามีเศษดินปะปนอยู่จำนวนมาก
“วิธีการปรับหน้าดินที่ชาวนาเกลือใช้กันมานาน คือ การกลิ้งนาเกลือ แต่เดิมชาวนาจะใช้แรงงานคนจำนวน 2-4 คนต่อการลากลูกกลิ้งหนึ่งลูก ต่อมาจึงเปลี่ยนเป็นการใช้เครื่องยนต์สันดาบภายในโดยใช้คนขับหนึ่งคนนั่งอยู่บนรถ ซึ่งโดยปกติจะใช้ระยะเวลาประมาณ 1 ชั่วโมงต่อรอบการกลิ้งที่ครอบคลุมทั่วกระทงนา (1 กระทงนา มีขนาดพื้นที่ประมาณ 100 x 50 เมตร หรือเท่ากับ 5,000 ตารางเมตร) จึงมองว่าปัจจุบันด้วยเทคโนโลยีมีความก้าวหน้ามากขึ้นเรื่อยๆ หากสามารถพัฒนารถปรับหน้าดินนาเกลือด้วยเทคโนโลยีหุ่นยนต์และระบบอัตโนมัติ ก็น่าจะช่วยประหยัดค่าใช้จ่ายให้กับชาวนาเกลือซึ่งเป็นส่วนหนึ่งของภาคการเกษตรของไทย นอกจากจะช่วยลดแรงงานคน และลดต้นทุนค่าเชื้อเพลิงแล้ว ยังช่วยรักษาสิ่งแวดล้อมโดยการไม่ปล่อยก๊าซคาร์บอนไดออกไซด์ ออกสู่บรรยากาศและไม่มีการรั่วไหลของน้ำมันหล่อลื่นและน้ำมันเชื้อเพลิงลงสู่กระทงนาอีกด้วย” นรวิศว์ กล่าว
ทั้งนี้ หุ่นยนต์ปรับหน้าดินอัตโนมัติ 5G Zero Carbon ได้มีการทดสอบวิ่งบนพื้นที่นาเกลือ พบว่า สามารถใช้งานขับเคลื่อนถอยหลังเดินหน้าได้เหมือนรถทั่วไป แต่ไร้คนขับ และสามารถดูการทำงานได้ผ่านโทรศัพท์มือถือ
อย่างไรก็ตามผลงานชิ้นนี้ ยังถือเป็นหุ่นยนต์ต้นแบบตัวแรกที่ถูกคิดค้นและพัฒนาขึ้น เพื่อตอบโจทย์ชาวนาเกลือ จากไอเดียของคุณพ่อและการพัฒนาโดยนักศึกษารุ่นใหม่ที่ไม่ทิ้งอาชีพดั้งเดิมของครอบครัว นำมาต่อยอดขยายผลเพิ่มมูลค่าโดยใช้องค์ความรู้ด้านเทคโนโลยีหุ่นยนต์และระบบอัตโนมัติมาประยุกต์ใช้